在科技行业的轻装上阵浪潮中,利亚德始终以其卓越的年利视效科技和创新精神引领行业。如今,亚德正规的股票配资站在2025年的开启起点,利亚德正以全新的第增姿态迎接挑战,开启第二增长曲线,长曲迈向更加辉煌的轻装上阵未来。
改革增效,年利轻装上阵
在过去的亚德数年间,利亚德面临了诸多严峻挑战,开启但凭借一系列精准的第增战略调整,为下一轮的长曲蓬勃增长铺设了稳固的基石。
自利亚德2012年上市以来,轻装上阵其净利润始终保持盈利状态,年利直至2020年,亚德受大额商誉减值的影响,公司首次遭遇了净利润亏损的正规的股票配资困境。
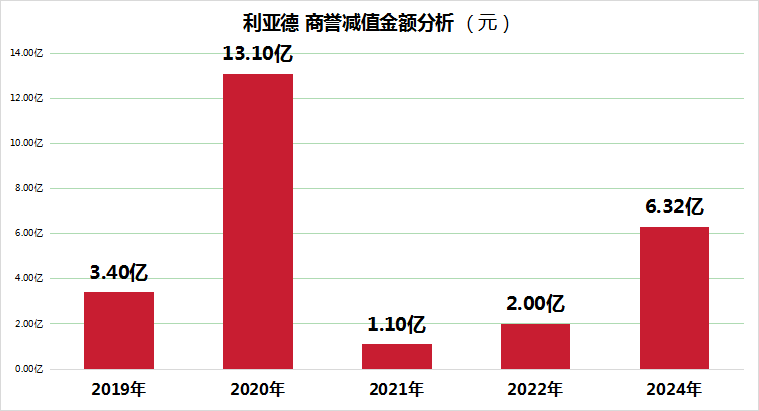
近年政策调整与市场波动下,利亚德净利润屡受商誉减值拖累。公司基于子公司业务及预期分析,依会计政策,2019 - 2024 年分别计提 3.4 亿、13.1 亿、1.1 亿、2 亿、6.3亿商誉减值,累计约26 亿元。不过,至此商誉余额仅剩1.3亿元,这也意味着利亚德的商誉减值风险已大为降低,未来将轻装上阵。
财务状况不断改善,经营性现金流充裕
近年来,利亚德的财务状况不断优化。从资产负债率这一指标来看,从2021年开始,利亚德资产负债率连续降低,到2024年资产负债率降至40.58%,同比去年减少2.68%。2025年1月,公司又通过提前赎回“利德转债”,进一步优化了财务结构。如今,利亚德的银行授信充裕,为未来发展提供更加稳健的资金支持。
在企业良好经营管理下,利亚德保持每年分红的积极治理,旨在回馈股东。截至2023年累计分红13次,累计分红金额为 11.79亿元。步入2024年,财报显示报公司现金分红额度提升至约2.71亿元,创下了上市以来的新高。
与此同时,利亚德持续深化降本增效策略,推进人员结构优化,精简组织架构,优化管理流程,并大力加强数字化建设和提升生产自动化水平,这些举措有力地推动了生产效率、管理效率和盈利能力的进一步提升。
技术创新引领未来,直渠融合+双品牌战略
在科技创新要求较高的LED行业中,利亚德在技术创新方面从未止步。自2020年全球首个Micro LED量产基地启用,利亚德便引领新一轮技术应用与技术迭代。
2024年公司Micro LED营收超8亿元,并连续两年实现订单翻倍。
此外,利亚德的全球化战略正在加速推进。2024年开始,国内市场实现直销渠道融合发展,大幅调整人员及组织架构,完善业绩考核与激励机制;欧美市场重塑管理团队,坚定落实双品牌战略(利亚德leyard、平达planar),扩大海外销售队伍及全球布局。
利亚德不仅扩充了斯洛伐克工厂的产能,还启动了沙特合资工厂的建设,以更好地服务于国际客户。同时,公司进一步加大研发投入,着力推进适销对路产品的开发和营销。
站稳两大风口,开启第二增长曲线
李军董事长在2025年新春年会上表示,公司已经成功跨越了最为艰难的阶段,接下来将致力于开拓第二增长曲线。这一增长曲线将围绕技术创新、场景创新和商业模式创新展开。
利亚德将继续深耕智能显示板块,同时抓住文旅夜游和AI与空间计算两大业务增长点,帮助企业实现新一轮高速增长。
在文旅夜游方面,利亚德在文旅夜游领域拥有深厚的技术积累和市场基础。2024年,公司对文旅夜游业务进行了改革重组。随着旅游经济从快速复苏阶段转向繁荣发展新周期,文旅板块以“场、馆、 秀、游”业务形态布局城市更新与景区提升两大市场,以文化科技融合创新,打造文旅消费新场景,打造了“衡阳·南岳第一峰”旧城提升,“邯郸·夜游大名府”等标杆项目,取得了突破性成绩。
2025年,公司将继续通过创新商业模式、优化团队管理和加强场景研发,进一步提升文旅夜游业务的竞争力。此外,公司还将加强与高校、科研机构、艺术家的合作,推动文旅产业的数字化转型。
在AI与空间计算方面,利亚德旗下虚拟动点在AI 与空间计算目前已经沉淀了包括算法、数据、硬件三大领域一系列核心能力,已经拥有自主研发的光学定位算法,机器视觉算法,以及动作大模型。
此外,虚拟动点已经积累了成熟的机器人业务能力,具体包括四个领域:数据能力,服务能力,硬件能力,算法能力。
数据方面,虚拟动点凭借业内领先的高质量动作数据库,帮助机器人训练提升效率,现阶段正与多家合作伙伴共建人形机器人动作数据集;服务方面,虚拟动点可以为机器人厂商提供包括人形动作采集,机器人动作采集,遥操作训练,模拟训练等一系列训练服务。与此同时,在硬件方面开发了小型摄像头,配合SLAM算法的积累,为机器人提供空间定位摄像头。
展望2025年,文旅夜游以及AI与空间计算领域将成为利亚德第二增长曲线的关键支柱。一方面,公司将通过强化技术创新、拓宽国际市场以及促进文旅夜游业务的全面复苏,以焕然一新的面貌迎接未来的挑战与机遇。另一方面,利亚德正积极与多家机器人公司深化业务合作,致力于赋能机器人的动作训练、优化肢体控制算法,并助力提升机器人的视觉传感器性能。





 巴基斯坦军方:印度向巴本土及巴控克什米尔发射导弹
巴基斯坦军方:印度向巴本土及巴控克什米尔发射导弹 2024年A股民企分红率达到47.5% 创近19年新高
2024年A股民企分红率达到47.5% 创近19年新高 券商中期策略会再度活跃 科技创新成为主旋律
券商中期策略会再度活跃 科技创新成为主旋律